


Lo sapevate che … il CONTROLLO VETTORIALE,detto anche Field Oriented Control, si chiama così perchè il metodo di controllo dell’inverter o drives AC/AC identifica le correnti di statore del motore elettrico in corrente alternata ad induzione come 2 componenti ortogonali che possono essere visualizzati come un vettore.
Il primo componente definisce il flusso magnetico del motore, mentre il secondo componente la corrente che genera la coppia. Il sistema di controllo digitale calcola i relativi riferimenti: componente del flusso e componente di coppia, in modo continuativo secondo un modello matematico impostato nel firmware.


Schema a blocchi dalla domanda di brevetto degli Stati Uniti del 1971 Blaschke
Il sistema a controllo VETTORIALE viene generalmente utilizzato per i motori asincroni e sincroni in AC, originariamente sviluppato per motori ad alte prestazioni dove era necessario operare agevolmente su tutto il campo di velocità, superando i limiti intrinseci del controllo V / Hz (costante modulazione tensione e frequenza), che invece è un controllo di tipo SCALARE.
I pionieri dello sviluppo del controllo VETTORIALE sono i professori K. Hasse e F. Blaschke, presso il Technische Universität di Darmstadt tra il 1968 ed il 1970. Solo dopo la diffusione dei microprocessori nei primi anni 80 gli INVERTER GENERAL PURPOSE si sono resi appetibili al pubblico e disponibili commercialmente, consentendo lo sviluppo di controlli dapprima SCALARI, quindi VETTORIALI, appunto.

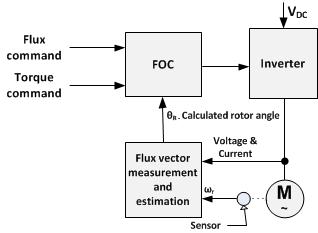
Diagramma a blocchi semplificato diretto FOC
Il controllo VETTORIALE, abbinato a MOTORI ASINCRONI IN CARCASSA QUADRA, dotati di elevata dinamicità, ha consentito di realizzare applicazioni molto veloci con controllo in posizione e retroazione da encoder, quali ad esempio camme elettroniche, senza la necessità di ricorrere a motori sincroni a magneti permanenti.
Una delle fascie di potenze / coppie che più rendono interessante l’adozione di un sistema a controllo vettoriale è compresa nel range tra i 30 ed i 160KW, riferita a 1500 RPM.